¿Cómo los videojuegos crean mundos tan realistas? ¿Cómo los satélites pueden guiar con precisión a un barco en medio del océano? ¿Cómo los robots en una fábrica saben exactamente dónde moverse?
Pues bien, detrás de todas estas maravillas de la tecnología moderna se esconde un héroe silencioso: las matemáticas. Y hoy vamos a sumergirnos en un fascinante campo que es la base de todo esto: los puntos, vectores y transformaciones isométricas.
Puede que suene complicado, pero no se asusten. Imaginen que están creando su propio videojuego o diseñando una torre fabulosa. Necesitarán herramientas para describir posiciones, movimientos y cambios en el espacio. ¡Y eso es exactamente lo que aprenderemos!
Desde el sistema cartesiano que usamos todos los días en nuestros teléfonos para ubicarnos, hasta los vectores que describen el movimiento de un avión, y las transformaciones que nos permiten girar y reflejar objetos en el espacio, todo esto forma parte de un conjunto de herramientas matemáticas increíblemente útiles y poderosas.
Así que prepárense para un viaje emocionante por el mundo de la geometría analítica. Les prometo que al final de esta lección, verán el mundo que les rodea con otros ojos, reconociendo la matemática que da forma a nuestra realidad. ¡Empecemos!
Plano Cartesiano
En el plano cartesiano, utilizamos dos rectas perpendiculares para ubicar puntos en un espacio euclidiano. El eje horizontal se llama «eje de las abscisas» (x) y el eje vertical se llama «eje de las ordenadas» (y). El punto de intersección es el origen del sistema de coordenadas. Aquí, los puntos en el eje X tienen coordenadas (x, 0 y los puntos en el eje Y tienen coordenadas (0, y).

Ejemplo: Imagina que estás usando una aplicación de mapas en tu teléfono.
- Aplicación: El sistema cartesiano se usa para ubicar la posición de diferentes lugares en un mapa digital. Las coordenadas (x, y) representan la latitud y longitud, permitiendo a la aplicación mostrar tu ubicación exacta y ayudarte a navegar de un punto a otro.
Distancia entre dos Puntos
Para calcular la distancia entre dos puntos \( A(x_1, y_1) \) y \( B(x_2, y_2) \), utilizamos la fórmula: \[ d_{AB} = \sqrt{(x_2 – x_1)^2 + (y_2 – y_1)^2} \]
Ejemplo: Quieres saber qué tan lejos están dos puntos en una ciudad, como tu casa y una tienda.
- Aplicación: Utilizas la fórmula de distancia entre dos puntos para calcular la distancia directa entre tu casa (punto A) y la tienda (punto B), ayudándote a estimar el tiempo que tomaría caminar o conducir entre los dos lugares.
Punto Medio de un Segmento
El punto medio de un segmento que conecta los puntos \( A(x_1, y_1) \) y \( B(x_2, y_2) \) se encuentra con la fórmula: \[ P_m = \left( \frac{x_1 + x_2}{2}, \frac{y_1 + y_2}{2} \right) \]
Ejemplo: Estás decorando una habitación y quieres colgar un cuadro en el centro de una pared.
- Aplicación: Usas la fórmula del punto medio para encontrar el punto exacto en el medio de la pared, asegurando que el cuadro quede perfectamente centrado.
Vectores
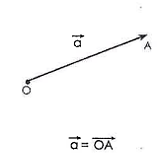
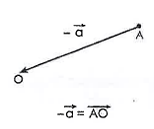
Un vector es un segmento de recta que tiene un origen y un destino. Se representa como una letra minúscula con una flecha \( \vec{a} \) o con dos letras mayúsculas que indican su origen y destino \( \overrightarrow{OA} \). Los vectores tienen módulo (magnitud), dirección y sentido. Si \( \vec{a} \) es un vector, su inverso aditivo \( -\vec{a} \) tiene la misma magnitud y dirección, pero sentido contrario.
Veamos su representación gráfica y repasemos:
- Módulo o magnitud: es la longitud del segmento.
- Dirección: está dada por la recta o cualquier paralela a ella.
- Sentido: Indicado por la flecha.
Si tenemos un vector \(\vec{a}\), el vector \(\vec{-a}\) es el inverso aditivo de \(\vec{a}\). El vector \(\vec{-a}\) tiene igual módulo, dirección pero sentido contrario a \(\vec{a}\).
Recuerda: Dos vectores son iguales o equipotentes si tienen igual módulo, dirección y sentido.
Ejemplo: Un barco necesita llegar a un puerto específico desde su ubicación actual.
- Aplicación: El vector indica la dirección y distancia que el barco debe seguir para llegar al puerto. El origen del vector es la ubicación actual del barco y el destino es el puerto.
Suma Geométrica de Vectores
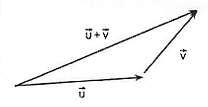
Para sumar dos vectores geométricamente, colocamos el origen del segundo vector en el destino del primero. El vector suma es el que va desde el origen del primero hasta el destino del segundo. Por ejemplo, si sumamos \( \vec{u} \) y \( \vec{v} \), la suma es \( \vec{u} + \vec{v} \).
Ejemplo: Un avión cambia de ruta debido a las condiciones meteorológicas.
- Aplicación: La suma geométrica de vectores se utiliza para calcular la nueva trayectoria del avión. Si el avión inicialmente se dirigía hacia el norte y luego cambia hacia el este, la nueva dirección se calcula sumando los dos vectores de desplazamiento.
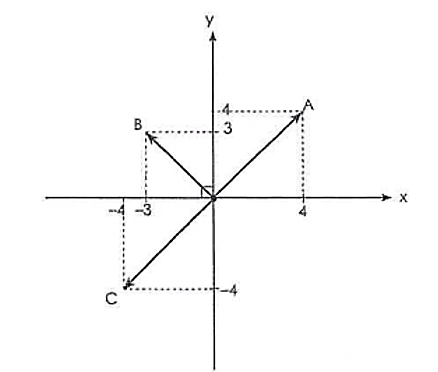
Vectores en el Plano
En el plano cartesiano, un vector puede representarse geométricamente desde el origen. Ejemplos de vectores son: \[ \vec{a} = (4, 4), \quad \vec{b} = (-3, 3), \quad \vec{c} = (-4, -4) \]
Ejemplo: Un robot necesita moverse en un almacén siguiendo coordenadas específicas.
- Aplicación: Los movimientos del robot se representan como vectores en el plano cartesiano, permitiendo programar sus desplazamientos exactos desde su posición inicial a través del almacén.
Operatoria con Vectores
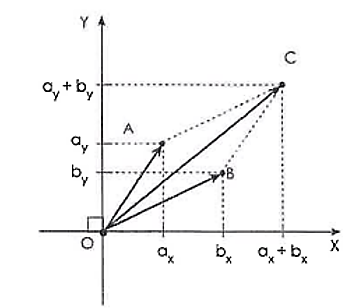
Para sumar y restar vectores en el plano, sumamos o restamos sus componentes: \[ \vec{a} + \vec{b} = (a_x + b_x, a_y + b_y) \] \[ \vec{a} – \vec{b} = (a_x – b_x, a_y – b_y) \]
Ejemplo: Un dron necesita entregar un paquete a una ubicación específica.
- Aplicación: Para ajustar su trayectoria, el dron puede sumar o restar vectores correspondientes a sus movimientos en cada dirección, permitiendo cambios precisos en su ruta para evitar obstáculos y llegar a su destino.
Vectores no Anclados en el Origen
Si tenemos los vectores \( \vec{a} = (a_x, a_y) \) y \( \vec{c} = (c_x, c_y) \), el vector que los une se obtiene restando sus componentes: \[ \overrightarrow{AC} = \vec{c} – \vec{a} = (c_x – a_x, c_y – a_y) \]

Ejemplo: Una persona quiere ir desde su casa al parque, pero primero pasa por la tienda.
- Aplicación: El vector que representa el desplazamiento desde la tienda hasta el parque se obtiene restando las coordenadas de la casa y la tienda, calculando así el movimiento necesario desde la tienda al parque.
Recuerda: Aplica para aquellos vectores cuyo punto de origen no es el centro del plano.
Producto Escalar
La ponderación de un vector por un escalar se realiza multiplicando cada componente del vector por el escalar: \[ k \cdot \vec{a} = k(a_x, a_y) = (k a_x, k a_y) \]
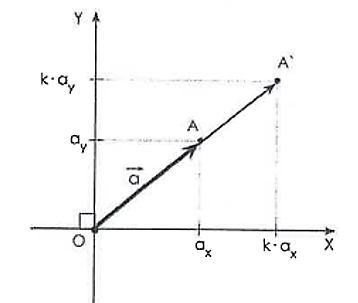
Recuerda: El sentido y módulo varían de acuerdo al valor del escalar.
- Si k>0, se mantiene el sentido, pero cambia la magnitud.
- Si k<0, cambia tanto la magnitud como el sentido del vector.
Ejemplo: Un coche necesita ajustar su velocidad en una autopista.
- Aplicación: La velocidad del coche, representada como un vector, se multiplica por un escalar (factor de velocidad) para aumentar o disminuir la velocidad según sea necesario.
Módulo o Magnitud de un Vector
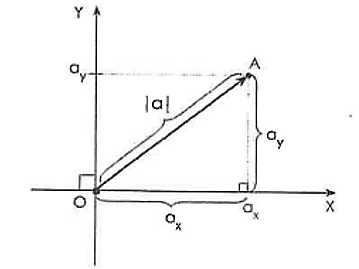
La magnitud de un vector se calcula con la fórmula: \[ ||\vec{a}|| = \sqrt{(a_x)^2 + (a_y)^2} \]
Ejemplo: Una persona quiere saber la longitud de una caminata desde su casa hasta un parque cercano.
- Aplicación: Calcula la magnitud del vector de desplazamiento entre su casa y el parque para determinar la distancia total a caminar.
Vectores Unitarios
Los vectores unitarios tienen magnitud 1 y se representan en los ejes coordenados como \( \vec{i} = (1, 0) \) y \( \vec{j} = (0, 1) \). Cualquier vector en el plano puede expresarse en términos de estos vectores unitarios: \[ \vec{a} = (a_x, a_y) = a_x \cdot \vec{i} + a_y \cdot \vec{j} \]
Ejemplo: Un ingeniero de software está diseñando gráficos en un videojuego.
- Aplicación: Los vectores unitarios se utilizan para definir las direcciones básicas (ejes x e y) en el plano de juego, permitiendo mover personajes y objetos de manera uniforme y controlada.
Transformaciones Isométricas
Las transformaciones isométricas son movimientos que aplicamos a una figura manteniendo su forma y tamaño. Estas incluyen traslación, rotación, simetría central y simetría axial.
Ejemplo: Un arquitecto revisa diferentes vistas de un edificio en un software de diseño.
- Aplicación: Utiliza transformaciones isométricas para rotar, trasladar y reflejar el modelo del edificio, asegurándose de que todas las perspectivas y dimensiones se mantengan consistentes durante las modificaciones.
Traslación
Para trasladar una figura, utilizamos un vector de traslación que indica dirección, sentido y magnitud. La nueva posición de un punto \( (x, y) \) tras la traslación por el vector \( \vec{T}(u, v) \) es: \[ (x, y) + \vec{T}(u, v) = (x + u, y + v) \]
Si al punto A de coordenadas (4,5), se le aplica una traslación dada por el vector traslación T(4,-3), entonces se obtiene el punto: (4,5)+T(4,−3)=(4+4,5+−3)=(8,2)

Ejemplo: Un diseñador gráfico mueve una imagen en un documento.
- Aplicación: Utiliza una traslación para desplazar la imagen desde su posición original a una nueva posición, manteniendo su orientación y tamaño original.
Rotación
Para rotar una figura, necesitamos un centro de rotación y un ángulo. Si rotamos un punto \( (x, y) \) respecto al origen \( O(0, 0) \) por un ángulo de 90°, 180°, 270° o 360°, las nuevas coordenadas son:
| Inicial | 90° | 180° | 270° | 360° |
| (x, y) | (-y, x) | (-x, -y) | (y, -x) | (x, y) |
Ejemplo: Rotar \( A(4, 3) \) 90° en torno al origen da \( A'(−3, 4) \).
Ejemplo: Un fotógrafo ajusta la orientación de una foto en su editor.
- Aplicación: Aplica una rotación a la foto para alinear el horizonte correctamente, girándola en torno a un punto central (el origen).
Importante: la tabla previa se refiere a rotaciones positivas o bien antihorarias, las rotaciones negativas u horarias intercambian la indicación dada para 90° en la de 270° y viceversa.
Simetría Central
En una simetría central, un punto se refleja respecto a otro punto (centro de simetría), manteniendo las distancias iguales. La simetría respecto al origen convierte \( (x, y) \) en \( (-x, -y) \).
Ejemplo: Una persona diseña un logo simétrico para una empresa.
- Aplicación: Utiliza la simetría central para reflejar la mitad del logo sobre un punto central, asegurando que ambas mitades sean idénticas y equilibradas.
Figuras con Centro de Simetría
Las figuras con centro de simetría incluyen círculos, cuadrados y todos los polígonos regulares con un número par de lados (hexágono regular, octágono regular, etc.). Las figuras sin centro de simetría incluyen triángulos y polígonos regulares con un número impar de lados (pentágono regular, heptágono regular, etc.).
Ejemplo: Alguien está cortando papel para hacer decoraciones simétricas.
- Aplicación: Dobla el papel por la mitad y corta una forma, de modo que al desdoblarlo, las dos mitades sean exactamente iguales, demostrando el centro de simetría.
Simetría Axial
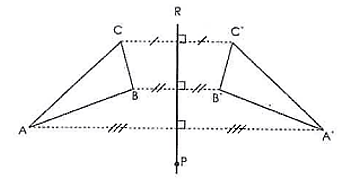
En una simetría axial, una figura se refleja respecto a una recta (eje de simetría), creando un efecto espejo. Los puntos homólogos están a la misma distancia del eje de simetría y el segmento que los une es perpendicular al eje.
Ejemplo: Un niño dibuja una mariposa en un papel.
- Aplicación: Dibuja un lado de la mariposa y luego refleja ese lado respecto a una línea central (eje de simetría), asegurando que ambas alas sean idénticas.
Figuras con Eje de Simetría
Las figuras pueden tener múltiples ejes de simetría. Por ejemplo, un cuadrado tiene 4, un triángulo equilátero tiene 3, un rectángulo tiene 2, y un círculo tiene infinitos ejes de simetría. Los polígonos regulares tienen tantos ejes de simetría como lados.
Ejemplo: Una persona hace un diseño de un trébol de cuatro hojas.
- Aplicación: Cada hoja del trébol es una imagen especular respecto a los ejes de simetría que pasan por el centro del trébol, creando un diseño balanceado y simétrico.